Starting Date: 08.06.2020
Prerequisites: Knowledge of python, C++
Will results be assigned to University:
The use of data from extreme environments in computer vision have shown an increase of interest in recent years as drones and autonomous vehicles were introduced into new uses. Nuclear plants, deep underwater and space vehicles are some of the areas computer vision can be applied to develop a fully autonomous system. Furthermore, the development of new sensors and vision libraries has allowed computer vision applications to increase their feasibility.
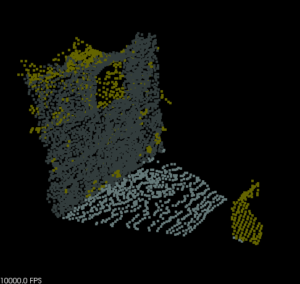
The objective of this study is to analyse the scene of a nuclear cell and prepare the 3D system coordinates for a robotic system to perform several manoeuvres. The focus is mainly on the analysis of 3D point clouds to determine the scene in real-world coordinates. The point cloud is visualised using the VTK toolkit. The interns are expected to have good knowledge of Python and C++.

This study will build upon Connect-R project: Providing Structure in Unstructured Extreme Environments
[1] PointCloudLibrary/pcl: Point Cloud Library (PCL)
[2] Open3D – A Modern Library for 3D Data Processing
[3] Depth Camera D435i – Intel® RealSense™ Depth and Tracking Cameras
[4] VTK – The Visualization Toolkit
- Deliverables:
Software/algorithm using PCL, Open3D, VTK
Research paper to be submitted to an international journal/conference - Outcomes:
Development of programming skills
Exposure to research work and advanced algorithms in computer vision - Desirable skills:
Programming skills in Python, C++
Some knowledge of Matlab
Technical supervisors:
Dr. Georgios Mastorakis, RA in AI and Robotics
Georgios.Mastorakis@rhul.ac.uk